Kavisha Vidanapathirana
PhD student at QUT and CSIRO. Research intern at AIML.

Adelaide, Australia.
About Me
- I am a PhD student at the Queensland University of Technology, advised by Prof. Sridha Sridharan and Prof. Clinton Fookes. My project is in collaboration with CSIRO Robotics, advised by Dr. Peyman Moghadam. During my PhD, I interned (twice) at The Australian Institute for Machine Learning, advised by Prof. Simon Lucey.
- My PhD thesis has been accepted for graduation and my conferral will be in December, 2024. I am currently working as a Research Assitant at QUT and a Visiting Researcher at AIML.
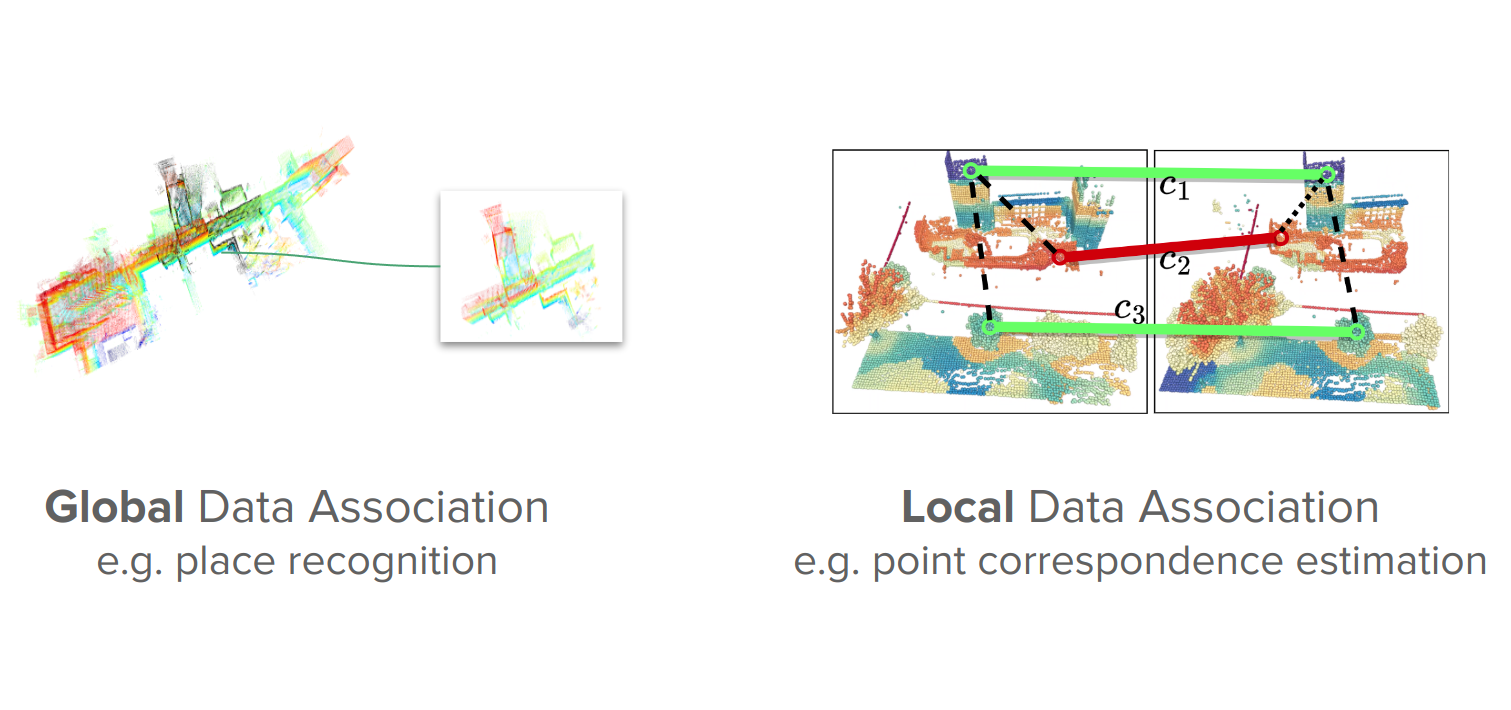
- My research interests lie in the general area of robotic vision and scene understanding. My PhD work mainly focused on utilizing geometric and temporal priors for solving 3D data association problems. At the moment I am studying recent advances in neural representations through the lens of classical signal processing concepts.
Awards
- ICRA 2022 - 2nd place in the General Place Recognition Competition organized by AirLab, Carnegie Mellon University. Invited talk: video.
- CSIRO Data61 PhD Top-Up Scholarship (2020-2023).
- High Distinction - Sri Lanka Mathematical Olympiad 2012.
News
| Oct, 2024 | My Ph.D. thesis has been accepted for graduation. eprint |
|---|---|
| Jun, 2024 | Paper at IJRR: “WildScenes: A Benchmark for 2D and 3D Semantic Segmentation in Natural Environments”. paper |
| Oct, 2023 | Paper at 3DV 2024 (oral - top 6.6%): “Multi-Body Neural Scene Flow”. paper |
| Feb, 2023 | Paper at RA-L: “Spectral Geometric Verification: Re-Ranking Point Cloud Retrieval for Metric Localization”. paper |
| Jan, 2023 | Paper at ICRA 2023: “Wild-Places: A Large-Scale Dataset for Lidar Place Recognition in Unstructured Natural Environments”. paper |
| May, 2022 | |
| Feb, 2022 | Paper at ICRA 2022: “LoGG3D-Net: Locally Guided Global Descriptor Learning for 3D Place Recognition”. paper |
| Jun, 2021 | Paper at ICRA 2021: “Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling”. paper |
Recent publications
-
 Queensland University of Technology. PhD Thesis by Publication. , 2024
Queensland University of Technology. PhD Thesis by Publication. , 2024 -
 In 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2019
In 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2019